Raspberry PI
Alimentare
Racire
Hat
Accesorii
Audio
Cabluri si Conectori
Camera
Cutii
LCD
Adaptoare si convertoare
ADC
CAN
Convertor nivel logic
Convertor USB la serial
Datalogger
Module
Multiplexor
Radio
Releu
RS-232
RS-485
RTC
Telecomenzi
Antene
Breadboard
Cabluri
Conectori
Sticker
Butoane, Tastaturi
Condensatoare
Generale
LED
Microcontrollere AVR
PCB - Placute Circuit
Rezistoare
Imprimante 3D
3Doodler
Componente
Filament Premium ABS 1.75 mm
Filament Premium ABS 3 mm
Filament Premium PLA 1.75 mm
Filamente Speciale
Prusa I3 DIY Kit
Kituri incepatori Arduino
Pentru Incepatori
Micro:bit
Carti
Junior Robotics
Lego Education
STEM Education
Ugears
Puzzle mecanic Ugears
Organizator de chei Wunderkey
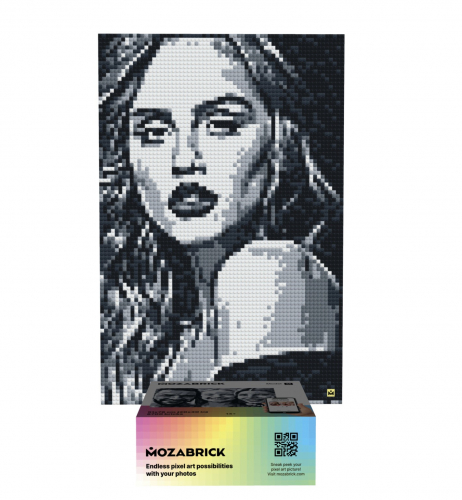
Constructor foto Mozabrick & Qbrix
Puzzle lemn Cluebox
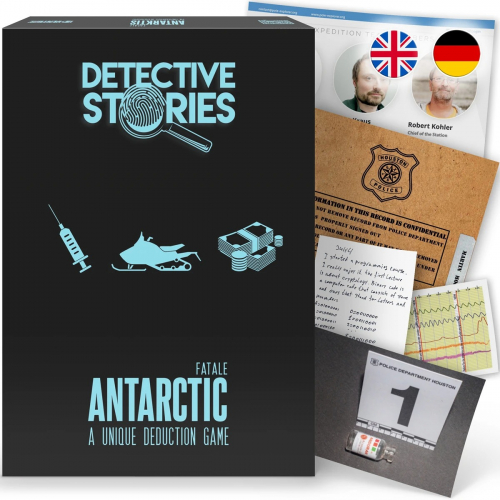
Jocuri de societate
3D Printer & CNC
Actuator
Altele
Driver
Encoder
Mecanice
Motoare
Roti si Senile
Rulmenti
Sasiu
Servomotoare
Suruburi, Piulite, Conectare
Arduino
Raspberry
.NET
Android
ARM
AVR
Espruino
Feather
Flora
FPGA
Intel
Latte Panda
Nvidia
Olinuxino
Photon
PIC
Platforme de dezvoltare
Python
Teensy
Thing
TI
Accelerometru
Biometric
Curent
Forta
Giroscop
ID
IMU
Infrarosu
Laser
Lichide
Lumina
Magnetic
PIR
Radar
Sonar
Sunet
Tensiune
Termocuple
Video
Vreme
Acumulatori
Alimentatoare
Baterii
Incarcator
Regulator Step-Down
Regulator Step-Down Step-Up
Regulator Step-Up
Solar
Stabilizator tensiune
Surse de alimentare
2.4Ghz
433Mhz
868Mhz
Antene si Cabluri
Bluetooth
GSM
LoRa
Wifi
Wireless
Xbee
Proxxon
Unelte si Instrumente
Cadouri
Ultimele produse vizualizate
Newsletter Nu rata ofertele si promotiile noastre
Social Urmareste-ne in social media
Suport clienti Email tehnic si cereri de oferta B2B: info@robofun.ro
Compara produse
Trebuie sa mai adaugi cel putin un produs pentru a compara produse.
A fost adaugat la favorite!
A fost sters din favorite!