
 Accelerometru + Giroscop IMU MPU 6050
Accelerometru + Giroscop IMU MPU 6050
![Accelerometru + Giroscop IMU MPU 6050 [1]](https://gomagcdn.ro/domains/robofun.ro/files/product/original/mpu-6050-1-300128-256-876732.jpg "Accelerometru + Giroscop IMU MPU 6050 [1]")
![Accelerometru + Giroscop IMU MPU 6050 [2]](https://gomagcdn.ro/domains/robofun.ro/files/product/original/mpu-6050-pini-498797-256-904882.jpg "Accelerometru + Giroscop IMU MPU 6050 [2]")
![Accelerometru + Giroscop IMU MPU 6050 [0]](https://gomagcdn.ro/domains/robofun.ro/files/product/medium/mpu-6050-1-300128-256-876732.jpg "Accelerometru + Giroscop IMU MPU 6050 [0]")
![Accelerometru + Giroscop IMU MPU 6050 [1]](https://gomagcdn.ro/domains/robofun.ro/files/product/medium/mpu-6050-pini-498797-256-904882.jpg "Accelerometru + Giroscop IMU MPU 6050 [1]")
Stoc sku: SEN-IMU-01
Durata de livrare: In acest moment nu avem o data de sosire.
Cod Produs:
00004183
Ai nevoie de ajutor?
+40 373 813 088
La achizitionarea acestui produs primiti
9
Lei pentru comenzile viitoare
- Descriere
- Video (1)
- Review-uri (1)
Cod Sursa
#include "I2Cdev.h"
#include "MPU6050.h"
// Arduino Wire library is required if I2Cdev I2CDEV_ARDUINO_WIRE implementation
// is used in I2Cdev.h
#if I2CDEV_IMPLEMENTATION == I2CDEV_ARDUINO_WIRE
#include "Wire.h"
#endif
// class default I2C address is 0x68
// specific I2C addresses may be passed as a parameter here
// AD0 low = 0x68 (default for InvenSense evaluation board)
// AD0 high = 0x69
MPU6050 accelgyro;
//MPU6050 accelgyro(0x69); // <-- use for AD0 high
int16_t ax, ay, az;
int16_t gx, gy, gz;
// uncomment "OUTPUT_READABLE_ACCELGYRO" if you want to see a tab-separated
// list of the accel X/Y/Z and then gyro X/Y/Z values in decimal. Easy to read,
// not so easy to parse, and slow(er) over UART.
#define OUTPUT_READABLE_ACCELGYRO
// uncomment "OUTPUT_BINARY_ACCELGYRO" to send all 6 axes of data as 16-bit
// binary, one right after the other. This is very fast (as fast as possible
// without compression or data loss), and easy to parse, but impossible to read
// for a human.
//#define OUTPUT_BINARY_ACCELGYRO
#define LED_PIN 13
bool blinkState = false;
void setup() {
// join I2C bus (I2Cdev library doesn't do this automatically)
#if I2CDEV_IMPLEMENTATION == I2CDEV_ARDUINO_WIRE
Wire.begin();
#elif I2CDEV_IMPLEMENTATION == I2CDEV_BUILTIN_FASTWIRE
Fastwire::setup(400, true);
#endif
// initialize serial communication
// (38400 chosen because it works as well at 8MHz as it does at 16MHz, but
// it's really up to you depending on your project)
Serial.begin(38400);
// initialize device
Serial.println("Initializing I2C devices...");
accelgyro.initialize();
// verify connection
Serial.println("Testing device connections...");
Serial.println(accelgyro.testConnection() ? "successful" : "failed");
// configure Arduino LED for
pinMode(LED_PIN, OUTPUT);
}
void loop() {
// read raw accel/gyro measurements from device
//accelgyro.getMotion6(&ax, &ay, &az, &gx, &gy, &gz);
// these methods (and a few others) are also available
accelgyro.getAcceleration(&ax, &ay, &az);
//accelgyro.getRotation(&gx, &gy, &gz);
#ifdef OUTPUT_READABLE_ACCELGYRO
// display tab-separated accel/gyro x/y/z values
Serial.print("a/g:t");
Serial.print(ax);
Serial.print("t");
Serial.print(ay);
Serial.print("t");
Serial.print(az);
Serial.print("t");
Serial.print(gx);
Serial.print("t");
Serial.print(gy);
Serial.print("t");
Serial.println(gz);
#endif
#ifdef OUTPUT_BINARY_ACCELGYRO
Serial.write((uint8_t)(ax >> 8));
Serial.write((uint8_t)(ax & 0xFF));
Serial.write((uint8_t)(ay >> 8));
Serial.write((uint8_t)(ay & 0xFF));
Serial.write((uint8_t)(az >> 8));
Serial.write((uint8_t)(az & 0xFF));
Serial.write((uint8_t)(gx >> 8));
Serial.write((uint8_t)(gx & 0xFF));
Serial.write((uint8_t)(gy >> 8));
Serial.write((uint8_t)(gy & 0xFF));
Serial.write((uint8_t)(gz >> 8));
Serial.write((uint8_t)(gz & 0xFF));
#endif
// blink LED to indicate activity
blinkState = !blinkState;
digitalWrite(LED_PIN, blinkState);
}
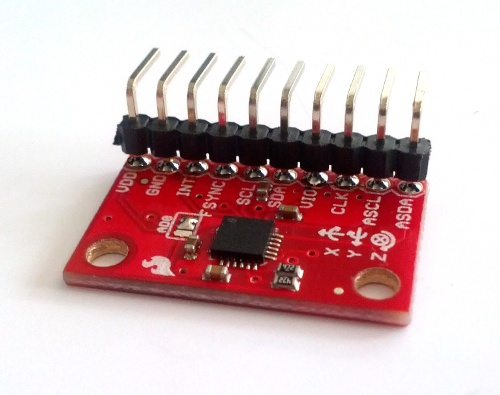
Varianta cu pini
Acest produs este disponibil atat in varianta fara pini (ca in pozele de mai sus), cat si in varianta cu pini tata gata lipiti, ca in imaginea de mai jos. Daca doriti varianta cu pini, selectati optiunea "Da, cu pini lipiti". Acest lucru va adauga 5 RON la pretul produsului. Daca alegeti varianta cu pini, cea mai simpla conectare cu placa Arduino se face folosind un set de fire mama-tata.
Specificatii:
- Output I2C, matrice de rotatie, unghiurile Euler
- Tensiunea de alimentare : 2.3 - 3.4V
- Tri-Axis Gyro . Sensibilitate 131 LSBs/dps . Scala ±250, ±500, ±1000, and ±2000dps
- Tri-Axis accelerometru . Scala of ±2g, ±4g, ±8g and ±16g
- Engine Digital Motion Processing™ (DMP™) pentru detectarea gesturilor
- Autocalibrare
- Senzor de temperatura
Linkuri:
Daca doresti sa iti exprimi parerea despre acest produs poti adauga un review.
Recomandari
-2878-167071.jpg "Modul accelerometru/giroscop cu 3 axe MPU 6050")
Produse similare
")

Modul accelerometru si giroscop Adafruit LSM6DSO32 6-DoF


Giroscop 3 axe L3GD20H

Modul senzor de miscare GY-9255 - IMU

Breakout senzori Adafruit LSM6DSOX + LIS3MDL

Breakout accelerometru si giroscop Adafruit LSM6DSOX 6 DoF

Placa SparkFun OpenLog Artemis

Senzor de orientare Redshift Labs UM7

Senzor de orientare Redshift Labs UM7-LT


Kit senzori SparkFun


SparkFun DataLogger IoT - 9DoF
 1")
Suport clienti Email tehnic si cereri de oferta B2B: contact@robofun.ro
+40 373 813 088 info@robofun.ro
catalin,
RaspundeAm copiat codul sursa de pe site si imi afiseaza eroarea asta: "exit status 1" Imi puteti spune din ce cauza este?
A fost util acest review?